k-d树学习笔记
Published on 2016-04-27在计算机科学里,k-d树(k-维树的缩写)是在 维欧几里德空间组织点的数据结构。k-d树可以使用在多种应用场合,如多维键值搜索(例:范围搜寻及最邻近搜索)。k-d树 是空间二分树(Binary space partitioning)的一种特殊情况。而在算法竞赛中,k-d树往往用于在二维平面内的信息检索。本文介绍算法竞赛中常用的二维 k-d树, 维可以很方便的扩展。
定义
k-d树(k-dimensional tree),是一棵二叉树,树中存储的是一些 维数据。在一个 维数据集合上构建一棵 k-d树 代表了对该 维数据集合构成的 维空间的一个划分,即树中的每个结点就对应了一个 维的超矩形区域(Hyperrectangle)。
如果觉得上面的概念难以理解,我们先从低维入手。
一维的 k-d树
对于一维的情况,所有的点都在数轴上面,此时 k-d树 其实就是二叉搜索树。
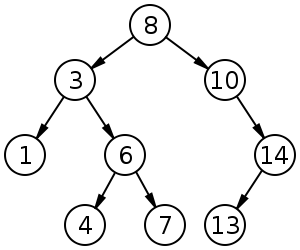
二叉搜索树(Binary Search Tree,BST),是具有如下性质的二叉树:
- 若它的左子树不为空,则左子树上所有结点的值均小于它的根结点的值;
- 若它的右子树不为空,则右子树上所有结点的值均大于它的根结点的值;
- 它的左、右子树也分别为二叉搜索树;
例如,下图是一棵二叉搜索树,其满足 BST 的性质。
二维的 k-d树
二维的 k-d树 遇到了一个问题,在一维中,坐标只有 1 维,所以我们在与根节点比较的时候,只用比较仅有的一维即可。但是二维却有 坐标,如何进行比较呢?
可以这样,对于每一层,我们指定一个划分维度(轴垂直分区面 axis-aligned splitting planes),最简单就是轮流按照 维和 y 维划分。那么假如我们这一层按照 维划分,那么在根节点的左子树 坐标小于根节点的 坐标,在根节点的右子树 坐标大于根节点的 坐标。
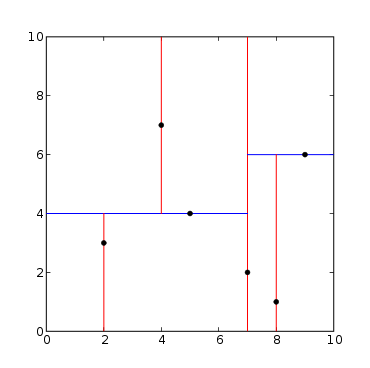
可以看到,每一次划分都用一条水平线或垂直线将平面分成了不相交的两部分。
而 k-d树 的节点保存的信息我们也清楚了:
struct kdTree { kdTree *ch[2]; Point p, r1, r2; //节点代表的点,子树所覆盖的矩形区域的左下角,右上角 };
k 维的 k-d树
由于三维以上我们无法想象了,但根据低维的情况不难想到, 维的 k-d树 的每一层也需要确定一个维度,来对 维空间上的点进行划分。
建树
在构造 1 维 BST 树时,一个 1 维数据根据其与树的根结点进行大小比较,来决定是划分到左子树还是右子树。
同理,我们也可以按照这样的方式,将一个 维数据与 k-d树 的根结点进行比较,只不过不是对 维数据进行整体的比较,而是选择某一个维度 ,然后比较两个数据在该维度 上的大小关系,即每次选择一个维度 来对 维数据进行划分,相当于用一个垂直于该维度 的超平面将 维数据空间一分为二,平面一边的所有 维数据在 维度上的值小于平面另一边的所有 维数据对应维度上的值。
也就是说,我们每选择一个维度进行如上的划分,就会将 维数据空间划分为两个部分,如果我们继续分别对这两个子 维空间进行如上的划分,又会得到新的子空间,对新的子空间又继续划分,重复以上过程直到每个子空间都不能再划分为止。以上就是构造 k-d树 的过程。
那么如果是二维特殊情况,就变得非常好理解了,通俗的来说就是通过过已有点的横线,竖线来划分二维平面。
上述过程中涉及到两个重要的问题:
- 每次对子空间的划分时,怎样确定在哪个维度上进行划分?
- 在某个维度上进行划分时,怎样确保在这一维度上的划分得到的两个子集合的数量尽量相等,即左子树和右子树中的结点个数尽量相等?
对于第一个问题,有很多种方法可以选择划分维度(axis-aligned splitting planes),所以有很多种创建 k-d树 的方法。 最典型的方法如下:
随着树的深度轮流选择维度来划分。例如,在二维空间中根节点以 x 轴划分,其子节点皆以 y 轴划分,其孙节点又以 x 轴划分,其曾孙节点则皆为 y 轴划分,依此类推。
另外的划分方法还有最大方差法(max invarince),在这里不做介绍。
而对于第二个问题,也是在 BST 中会遇到的一个问题。在 BST 中,我们是将数据的中位数作为根节点,然后再左右递归下去建树,这样可以得到一棵平衡的二叉搜索树。
同样,在 k-d树 中,若在维度 上进行划分时,根节点就应该选择该维度 上所有数据的中位数,这样递归子树的大小就基本相同了。
bool dimension; inline bool cmp(const Point &p1, const Point &p2) { if (dimension == 0) return (p1.x < p2.x) || (p1.x == p2.x && p1.y < p2.y); return (p1.y < p2.y) || (p1.y == p2.y && p1.x < p2.x); } kdTree* build(int l, int r, bool d) { if (l >= r) return null; dimension = d; int mid = (l + r) / 2; nth_element(ps + l, ps + mid, ps + r, cmp); kdTree *o = new kdTree(ps[mid]); o->ls = build(l, mid, d ^ 1), o->rs = build(mid + 1, r, d ^ 1); o->maintain(); return o; }
注意 nth_element 函数的使用
template<class _RanIt, class _Pr> inline void nth_element(_RanIt _First, _RanIt _Nth, _RanIt _Last, _Pr _Pred) template<class _RanIt> inline void nth_element(_RanIt _First, _RanIt _Nth, _RanIt _Last)
对给定范围 内的元素进行重新布置。使得 位置的值就是所有元素第 k 小的值。并把所有不大于 的值放到 的前面。把所有不小于 的值放到nth后面(不一定有序)。复杂度是 的。
所以建树的总复杂度为:。
插入
与二叉搜索树的插入很像,二叉搜索树是单纯比较值,而 k-d树 是与当前结点比较在 维度上的值,来决定到底要在左子树还是在右子树插入。比较简单,复杂度:。
void modify(kdTree* &o, const Point &p) { if (o == null) {o = new kdTree(p); return;} int d = cmp(p, o->p) ^ 1; dimension ^= 1; modify(o->ch[d], p); o->maintain(); }
要注意的是插入以后要记得维护走过的节点子树覆盖的矩形区域。
查找
最近点
构建好一棵 k-d树 后,下面给出利用二维 k-d树寻找距离点 最近的点:
- 设定答案 初始值
- 将点 从根结点开始,先用根节点代表的点更新答案。由于根节点的左右儿子各代表一个矩形区域,而两个区域都有可能存在距离点 最近的点,我们优先选择距离点 最近的矩形递归查询。
- 然后以 为圆心, 为半径画圆(曼哈顿距离就是矩形),如果与之前未递归的矩形相交,则递归下去,否则不可能有更优答案。
void query(const kdTree* o, const Point &p) { if (o == null) return; ans = min(ans, dis(p, o->p)); int d = o->ls->dis(p) > o->rs->dis(p); //优先递归查询点到左右儿子矩形距离小的那个 query(o->ch[d], p); if (o->ch[d ^ 1]->dis(p) < ans) query(o->ch[d ^ 1], p); //如果另一个儿子有可能比当前结果小,就递归下去 }
事实上就是搜索加剪枝,可以证明:单次查询的复杂度一般是 ,最坏 的。
k 远点
最近点很好查询, 远点也是不难的,我们维护一个小根堆,初始向堆里面放入 个 ,然后之前的与 比较就变成了与堆顶比较。
typedef long long type; priority_queue<type, vector<type>, greater<type> > pq; //小根堆 void query(const kdTree *o, const Point &p) { if (o == null) return; type st = dis(o->p, p); if (st >= pq.top()) pq.pop(), pq.push(st); //大于堆顶,则弹出堆顶并更新 type dis[2] = {o->ls->dis(p), o->rs->dis(p)}; int d = dis[0] < dis[1]; query(o->ch[d], p); if (dis[d ^ 1] >= pq.top()) query(o->ch[d ^ 1], p); //最远都比堆顶大,才有可能更优 }
习题
光说不练假把式。细节还是得看代码的。
BZOJ 2648 & 2716: 这里是曼哈顿距离最近点
// Created by Sengxian on 4/26/16. // Copyright (c) 2016年 Sengxian. All rights reserved. // BZOJ 2648 k-d 树 #include <algorithm> #include <iostream> #include <cassert> #include <cctype> #include <cstring> #include <cstdio> #include <vector> #include <queue> #include <set> #define ls ch[0] #define rs ch[1] using namespace std; inline int ReadInt() { static int n, ch; n = 0, ch = getchar(); while (!isdigit(ch)) ch = getchar(); while (isdigit(ch)) n = (n << 3) + (n << 1) + ch - '0', ch = getchar(); return n; } const int maxn = 500000 + 3, maxm = 500000 + 3, INF = 0x3f3f3f3f; struct Point { int x, y; Point(int x = 0, int y = 0): x(x), y(y) {} }ps[maxn]; bool dimension; //比较当前维度下大小关系 bool cmp(const Point &p1, const Point &p2) { if (dimension == 0) return p1.x < p2.x || (p1.x == p2.x && p1.y < p2.y); return p1.y < p2.y || (p1.y == p2.y && p1.x < p2.x); } //计算距离 int dis(const Point &p1, const Point &p2) { return abs(p1.x - p2.x) + abs(p1.y - p2.y); } struct kdTree *null, *pit; struct kdTree { kdTree *ch[2]; Point p, r1, r2; kdTree(Point p): p(p), r1(p), r2(p) {ch[0] = ch[1] = null;} kdTree() {} void* operator new(size_t) {return pit++;} void maintain() { //维护当前点覆盖的矩形 r1.x = min(min(ls->r1.x, rs->r1.x), r1.x); r1.y = min(min(ls->r1.y, rs->r1.y), r1.y); r2.x = max(max(ls->r2.x, rs->r2.x), r2.x); r2.y = max(max(ls->r2.y, rs->r2.y), r2.y); } int dis(const Point &p) { //计算点到矩形边界的最近距离 if (this == null) return INF; int res = 0; if (p.x < r1.x || p.x > r2.x) res += p.x < r1.x ? r1.x - p.x : p.x - r2.x; if (p.y < r1.y || p.y > r2.y) res += p.y < r1.y ? r1.y - p.y : p.y - r2.y; return res; } }pool[maxn + maxm], *root; int n, m; void init() { pit = pool; null = new kdTree(); null->r1 = Point(INF, INF), null->r2 = Point(-INF, -INF); } kdTree* build(int l, int r, bool d) { if (l >= r) return null; int mid = (l + r) / 2; dimension = d; nth_element(ps + l, ps + mid, ps + r, cmp); //使用中位数来使树尽量平衡 kdTree *o = new kdTree(ps[mid]); o->ls = build(l, mid, d ^ 1), o->rs = build(mid + 1, r, d ^ 1); o->maintain(); return o; } int ans; void query(const kdTree* o, const Point &p) { if (o == null) return; ans = min(ans, dis(p, o->p)); int d = o->ls->dis(p) > o->rs->dis(p); //优先递归查询点到左右儿子矩形距离小的那个 query(o->ch[d], p); if (o->ch[d ^ 1]->dis(p) < ans) query(o->ch[d ^ 1], p); //如果另一个儿子有可能比当前结果小,就递归下去 } void modify(kdTree* &o, const Point &p) { if (o == null) {o = new kdTree(p); return;} int d = cmp(p, o->p) ^ 1; dimension ^= 1; modify(o->ch[d], p); o->maintain(); } int main() { init(); n = ReadInt(), m = ReadInt(); for (int i = 0; i < n; ++i) ps[i].x = ReadInt(), ps[i].y = ReadInt(); root = build(0, n, 0); while (m--) { int type = ReadInt(), x = ReadInt(), y = ReadInt(); if (type == 1) { dimension = 0; modify(root, Point(x, y)); } else if (type == 2) { ans = INF; query(root, Point(x, y)); printf("%d\n", ans); } } return 0; }
BZOJ 2626:欧几里得距离 远点
// Created by Sengxian on 4/27/16. // Copyright (c) 2016年 Sengxian. All rights reserved. // BZOJ 2648 k-d 树 #include <algorithm> #include <iostream> #include <cassert> #include <cctype> #include <cstring> #include <cstdio> #include <vector> #include <queue> #define ls ch[0] #define rs ch[1] using namespace std; inline int ReadInt() { static int n, ch; static bool flag; n = 0, ch = getchar(), flag = false; while (!isdigit(ch)) flag |= ch == '-', ch = getchar(); while (isdigit(ch)) n = (n << 3) + (n << 1) + ch - '0', ch = getchar(); return flag ? -n : n; } typedef double type; const int maxn = 100000 + 3; const type INF = 1e300; struct Point { int x, y, id; Point(int x = 0, int y = 0, int id = 0): x(x), y(y), id(id) {} }ps[maxn]; bool dimension; inline bool cmp(const Point &p1, const Point &p2) { if (dimension == 0) return (p1.x < p2.x) || (p1.x == p2.x && p1.y < p2.y); return (p1.y < p2.y) || (p1.y == p2.y && p1.x < p2.x); } inline type dis(const Point &p1, const Point &p2) { return (type)(p1.x - p2.x) * (p1.x - p2.x) + (type)(p1.y - p2.y) * (p1.y - p2.y); } struct kdTree *null, *pit; struct kdTree { kdTree *ch[2]; Point p, r1, r2; kdTree(const Point &p): p(p), r1(p), r2(p) {ch[0] = ch[1] = null;} kdTree() {} void* operator new(size_t) {return pit++;} inline void maintain() { r1.x = min(min(ls->r1.x, rs->r1.x), r1.x); r1.y = min(min(ls->r1.y, rs->r1.y), r1.y); r2.x = max(max(ls->r2.x, rs->r2.x), r2.x); r2.y = max(max(ls->r2.y, rs->r2.y), r2.y); } inline type dis(const Point &p) { if (this == null) return -INF; return max(max(::dis(p, r1), ::dis(p, r2)), max(::dis(p, Point(r1.x, r2.y)), ::dis(p, Point(r2.x, r1.y)))); } }pool[maxn], *root; void init() { pit = pool; null = new kdTree(); null->r1 = Point(0x3f3f3f3f, 0x3f3f3f3f), null->r2 = Point(-0x3f3f3f3f, -0x3f3f3f3f); } kdTree* build(int l, int r, bool d) { if (l >= r) return null; dimension = d; int mid = (l + r) / 2; nth_element(ps + l, ps + mid, ps + r, cmp); kdTree *o = new kdTree(ps[mid]); o->ls = build(l, mid, d ^ 1), o->rs = build(mid + 1, r, d ^ 1); o->maintain(); return o; } struct state { type dis; int id; state(type dis = 0, int id = 0): dis(dis), id(id) {} bool operator < (const state &s) const { return dis > s.dis || (dis == s.dis && id < s.id); } }; priority_queue<state> pq; //小根堆 void query(const kdTree *o, const Point &p) { if (o == null) return; state st = state(dis(o->p, p), o->p.id); if (st < pq.top()) {pq.pop(); pq.push(st);} //如果距离比堆顶大,立即更新 type dis[2] = {o->ls->dis(p), o->rs->dis(p)}; int d = dis[0] < dis[1]; //选距离较大的那个! query(o->ch[d], p); if (state(dis[d ^ 1], o->ch[d ^ 1]->p.id) < pq.top()) query(o->ch[d ^ 1], p); //如果距离比可能堆顶大,那么就可以递归下去 } int n, m; int main() { #ifndef ONLINE_JUDGE freopen("test.in", "r", stdin); #endif init(); n = ReadInt(); for (int i = 0; i < n; ++i) ps[i].x = ReadInt(), ps[i].y = ReadInt(), ps[i].id = i; root = build(0, n, 0); m = ReadInt(); while (m--) { int x = ReadInt(), y = ReadInt(), k = ReadInt(); while (!pq.empty()) pq.pop(); for (int i = 0; i < k; ++i) pq.push(state(-INF, 0)); query(root, Point(x, y)); printf("%d\n", pq.top().id + 1); } return 0; }
BZOJ 4520:欧几里得距离 远点对,注意会重复,所以变成 。
// Created by Sengxian on 4/27/16. // Copyright (c) 2016年 Sengxian. All rights reserved. // BZOJ 4520 k-d 树 #include <algorithm> #include <iostream> #include <cassert> #include <cctype> #include <cstring> #include <cstdio> #include <vector> #include <queue> #define ls ch[0] #define rs ch[1] using namespace std; inline int ReadInt() { static int n, ch; n = 0, ch = getchar(); while (!isdigit(ch)) ch = getchar(); while (isdigit(ch)) n = (n << 3) + (n << 1) + ch - '0', ch = getchar(); return n; } typedef long long type; const int maxn = 100000 + 3; const type INF = 0x3f3f3f3f3f3f3f3fLL; struct Point { int x, y; Point(int x = 0, int y = 0): x(x), y(y) {} }ps[maxn]; bool dimension; inline bool cmp(const Point &p1, const Point &p2) { if (dimension == 0) return (p1.x < p2.x) || (p1.x == p2.x && p1.y < p2.y); return (p1.y < p2.y) || (p1.y == p2.y && p1.x < p2.x); } inline type dis(const Point &p1, const Point &p2) { return (type)(p1.x - p2.x) * (p1.x - p2.x) + (type)(p1.y - p2.y) * (p1.y - p2.y); } struct kdTree *null, *pit; struct kdTree { kdTree *ch[2]; Point p, r1, r2; kdTree(const Point &p): p(p), r1(p), r2(p) {ch[0] = ch[1] = null;} kdTree() {} void* operator new(size_t) {return pit++;} inline void maintain() { r1.x = min(min(ls->r1.x, rs->r1.x), r1.x); r1.y = min(min(ls->r1.y, rs->r1.y), r1.y); r2.x = max(max(ls->r2.x, rs->r2.x), r2.x); r2.y = max(max(ls->r2.y, rs->r2.y), r2.y); } inline type dis(const Point &p) { if (this == null) return -INF; return max(max(::dis(p, r1), ::dis(p, r2)), max(::dis(p, Point(r1.x, r2.y)), ::dis(p, Point(r2.x, r1.y)))); } }pool[maxn], *root; void init() { pit = pool; null = new kdTree(); null->r1 = Point(0x3f3f3f3f, 0x3f3f3f3f), null->r2 = Point(-0x3f3f3f3f, -0x3f3f3f3f); } kdTree* build(int l, int r, bool d) { if (l >= r) return null; dimension = d; int mid = (l + r) / 2; nth_element(ps + l, ps + mid, ps + r, cmp); kdTree *o = new kdTree(ps[mid]); o->ls = build(l, mid, d ^ 1), o->rs = build(mid + 1, r, d ^ 1); o->maintain(); return o; } priority_queue<type, vector<type>, greater<type> > pq; //小根堆 void query(const kdTree *o, const Point &p) { if (o == null) return; type st = dis(o->p, p); if (st >= pq.top()) pq.pop(), pq.push(st); type dis[2] = {o->ls->dis(p), o->rs->dis(p)}; int d = dis[0] < dis[1]; query(o->ch[d], p); if (dis[d ^ 1] >= pq.top()) query(o->ch[d ^ 1], p); } int n, k; int main() { #ifndef ONLINE_JUDGE freopen("test.in", "r", stdin); #endif init(); n = ReadInt(), k = ReadInt(); for (int i = 0; i < n; ++i) ps[i].x = ReadInt(), ps[i].y = ReadInt(); root = build(0, n, 0); while (!pq.empty()) pq.pop(); for (int i = 0; i < 2 * k; ++i) pq.push(-1); for (int i = 0; i < n; ++i) query(root, ps[i]); printf("%lld\n", pq.top()); return 0; }